categorie: Elettricisti alle prime armi, Controller programmabili
Numero di visite: 8010
Commenti sull'articolo: 4
Un esempio di aggiornamento del circuito elettrico di un montacarichi mediante un controller programmabile (PLC)
Recentemente, il tema dell'automazione di vari processi tecnologici mediante controller programmabili (PLC) è diventato sempre più popolare. Nonostante ciò, ci sono pochissimi articoli pratici su Internet con esempi concreti di come programmare questi PLC. Questo argomento è molto interessante, perché è alla giunzione di apparecchiature elettriche, elettronica e programmazione. Imparare a scrivere programmi PLC è possibile senza nemmeno averli. La modalità di emulazione, disponibile in tutti i pacchetti software moderni, aiuta molto in questo.
In questo articolo mostrerò un esempio di traduzione di un circuito elettrico basato su dispositivi a relè (avviatori, relè) in un programma che funzionerà sul controller. Devo dire subito che questo è solo un piccolo progetto educativo e non pretende di spiegare altro oltre a spiegare i principi di base della programmazione di PLC con un esempio concreto.
Relè di trasporto merci
Lo schema iniziale per questo progetto è uno schema relativamente semplice di un montacarichi (montacarichi) con controllo a leva su due piani. Lo schema è mostrato nella figura seguente.

Paranco elettrico comunale con un motore a due fermate
C'è solo un motore nel circuito, che solleva e abbassa l'ascensore tra due piani. Questo è un motore asincrono trifase reversibile con un rotore di fase 380 V. Le resistenze di avviamento e i contatti di tre avviatori elettromagnetici sono collegati al rotore del motore, consentendo l'avvio del motore in 3 fasi. Questa soluzione consente nel processo di avviamento del motore di ridurre la sua corrente di avviamento e aumentare la coppia di avviamento.
L'avviamento del motore è automatizzato mediante tre relè di accelerazione (1RU - 3RU). Questi sono timer DC 24 volt convenzionali. Per la loro potenza c'è un trasformatore step-down e raddrizzatore.
Un freno elettromagnetico a blocco trifase è collegato ai terminali del motore, che, quando viene applicata la tensione al motore, frena il suo albero e quando la tensione scompare, l'albero del motore viene immediatamente bloccato e fissato in una posizione fissa.
Motore inverso utilizzando i contatti di due avviatori elettromagnetici (nei diagrammi B e H). L'alimentazione del circuito viene fornita attraverso un interruttore (sul circuito - WU) e un interruttore (1A).
L'inclusione nel lavoro dell'ascensore è possibile solo con tensione. È controllato da un relè di tensione (PH), che si trova sul lato sinistro del circuito. Ci sono anche prese e una campana che può essere attivata da qualsiasi sito per chiamare il conduttore.
Le porte dell'albero e della cabina si aprono e si chiudono manualmente. L'ascensore viene controllato mediante l'interruttore a leva in tre posizioni: "Su", "Giù" e "Zero".
Quando la maniglia viene spostata in una delle posizioni estreme, l'ascensore inizia a muoversi e quando viene raggiunto il pavimento desiderato, la maniglia viene spostata meccanicamente in posizione "Zero". Allo stesso tempo, i contatti nel circuito dell'interruttore vengono interrotti, la bobina di avviamento viene diseccitata, il motore viene disconnesso dalla rete, i contatti nel circuito del suo rotore si aprono e l'ascensore si arresta. Successivamente, puoi iniziare il movimento dell'ascensore nella direzione opposta.

L'ascensore merci appartiene a dispositivi ad alto rischio e nel suo circuito (come negli schemi di eventuali ascensori) ci sono un gran numero di interblocchi diversi contatti finecorsa e contatti di vari dispositivi di protezione.
In questo schema, si tratta di interruttori di sgancio (estremità) che controllano la chiusura delle porte della cabina, gli alberi dei piani inferiore e superiore, il sollevamento e l'abbassamento della cabina sopra le zone superiore e inferiore di lavoro, i contatti del "gioco delle funi di sollevamento" che si aprono quando il cavo è indebolito o allentato cabina dell'elevatore, contatti del limitatore di velocità, ricevitore e tendifilo. In totale - 14 sensori discreti.
Quando uno dei contatti elencati si apre, il motore dell'elevatore deve spegnersi e frenare all'istante, pertanto tutti i sensori, il contatto del relè di tensione e il pulsante "Arresto generale" sono collegati in serie al circuito della bobina degli attuatori elettromagnetici che controllano il motore.
Creazione di un programma PLC per un montacarichi
Il compito era che senza cambiare nulla nel dispositivo, in linea di principio, il funzionamento e i controlli dell'ascensore, trasferiscono il suo circuito da una vista relè obsoleta a un'opzione usando un controller programmabile.
Il vantaggio del modulo del programma per il controllo dell'installazione è che in futuro, se lo si desidera, il programma può essere facilmente modificato, migliorare la comodità di controllare l'ascensore, cambiare la logica del suo funzionamento e migliorarne la funzionalità. Ma queste azioni devono essere accompagnate da un cambiamento nella progettazione dell'ascensore e dall'aggiunta di altri dispositivi aggiuntivi al circuito. Nella nostra versione, tale compito non è stato posto.
In questo caso, è stata proposta un'opzione per modernizzare le apparecchiature elettriche di un montacarichi modificando il suo schema di controllo con un approccio tale che, ad esempio, non cambierebbe assolutamente nulla per una persona che gestisce un tale meccanismo.
Pertanto, salveremo il dispositivo di controllo principale per l'ascensore: l'interruttore a leva e lasceremo il motore asincrono con il rotore di fase con il suo avvio a tre stadi, anche se vogliamo ancora sostituirlo con un motore asincrono con un rotore a gabbia di scoiattolo, che viene attivato tramite l'avviatore statico. Ma per ora, non lo faremo, poiché questa soluzione semplificherà notevolmente il circuito elettrico dell'ascensore, il che non è molto complicato.
Quindi, divideremo il nostro schema in quattro zone (vedere lo schema dell'ascensore nella figura).
")
Nella zona 1, non toccheremo nulla, perché è responsabile della chiamata sonora dell'ascensore e controlla la presenza di tensione nel circuito. Anche la zona 2 con motore, freno elettromagnetico e contatti di potenza degli avviatori non cambia. Tutti i dispositivi della zona 4 possono essere eliminati, perché l'ordine di inclusione dei contatti nel circuito del rotore del motore all'avvio sarà controllato dai timer del software. Rimane la zona 3. La modernizzazione principale interesserà questa particolare zona.

Come controllore, prendiamo la società Ariete PLC. Il programma per lui sarà nella lingua CFC. Secondo me, questa è la lingua più conveniente per i principianti. È molto simile nel linguaggio dei blocchi funzionali FUPma con le sue piccole caratteristiche. Così tanti amano un'altra grande lingua - linguaggio ladder LD. Non ho nulla contro, ma su CFC È più conveniente per me compilare un programma per PLC, quindi ho usato questa lingua, ma qui tutto è per tutti. Per compilare il programma che utilizziamo il pacchetto CoDeSys 2.3.

Un programma è un insieme di blocchi funzionali (E, OR, NON, trigger e timer). Il programma di lavoro dell'ascensore merci nella lingua CFC:

Inizialmente avremo bisogno di blocchi E (elemento E). All'uscita dell'elemento è un'unità logica (nel programma -"TRUE") solo quando le unità logiche sono anche su tutti gli ingressi. Se lo stato di un solo ingresso differisce dall'unità, l'uscita viene reimpostata su zero (nel programma - "FALSE").
Questo elemento ci aiuterà a organizzare tutti i contatti di interblocco e contatti di sicurezza (ingressi discreti) e, come ricordi, ce ne sono 14 (nel programma sono indicati sotto il nome SQ1 - SQ14). All'ingresso del blocco E colleghiamo anche il contatto del relè di tensione e il pulsante "Arresto generale" (SB1). Per comodità, ho creato tutti i contatti su 3 elementi Ee poi ne usò un altro per combinarli in una catena.
Per impostazione predefinita, quando si aggiunge al programma, qualsiasi unità funzionale ha 2 ingressi. Se è necessario aggiungere un ulteriore input, è necessario puntare il blocco con il mouse, premere il tasto destro su di esso e selezionare "Blocca input". Pertanto, è possibile aggiungere qualsiasi numero richiesto di ingressi aggiuntivi al blocco.

L'interruttore a leva è collegato a due ingressi controller (nel programma - "SA_verh" e "SA_niz"). Un interruttore in ciascuna delle sue due posizioni estreme fornisce un'unità logica a una delle due RS trigger ("RS_verh" o "RS_niz"). Un trigger è un analogo di una bobina di avviamento con un contatto di blocco in un circuito di controllo del relè.
Per abilitarlo, inviare l'unità logica al contatto "SET"disabilitare - attivo"RESET". Trigger output "Q1"trasmette un segnale a una delle uscite del controller -"KM1" o "KM2"a cui sono collegati bobine del solenoide. Gli avviatori cambiano i contatti e controllano il motore.

L'inizio in tre fasi del programma è organizzato usando 2 timer "TON". Quando si applica un'unità logica all'ingresso del timer "IN"conta il tempo dato all'ingresso"PT"e commuta l'uscita di ritardo"Q"da zero logico a uno. Dopo che il primo timer (T1) è attivato da un segnale dalla sua uscita (Q), il tempo inizia a contare sul secondo timer (T2) e dopo un tempo specificato sull'ingresso PT, il secondo timer invia anche un'unità logica alla sua uscita (Q) .
Alle uscite del controller (nel programma - KM3, KM4 e KM5) Sono collegate 3 bobine di avviatore elettromagnetico. Il primo si accende immediatamente quando attivi KM1 o KM2 e collega la massima resistenza al rotore del motore, KM4 e KM5 accendere con timer e alternativamente in cortocircuito parte della resistenza di avviamento. Dopo aver avviato il motore, tutti e tre i motorini di avviamento rimangono in posizione ON.

elemento OR (OR logico) necessario per avviare contemporaneamente uno dei due avviatori principali, la parte del circuito responsabile dell'avviamento del motore a tre stadi è stata inclusa nel lavoro. Se è presente un'unità logica in uno degli ingressi dell'elemento "OR", un'unità logica viene trasmessa alla sua uscita, ovvero, per il suo funzionamento, è sufficiente un segnale su uno qualsiasi dei suoi ingressi.

Tra timer e uscite del controller E con uno degli ingressi inversi (cerchio di input). Per questo elemento, un'unità logica in uscita appare solo quando un segnale di unità logica viene applicato a un ingresso normale e uno zero logico viene applicato a un ingresso inverso.

Lo stesso elemento, solo con due ingressi inversi, si trova accanto agli ingressi "SA_verh" e "SA_niz", ricevendo segnali dall'interruttore a leva. Ciò è necessario per garantire che tutti gli avviatori sulle uscite siano spenti quando l'interruttore viene riportato nella posizione zero, quando entrambi i circuiti Su e Giù sono aperti.
Se ci sono due zeri logici all'ingresso di un tale elemento E fornisce un'unità logica all'uscita dell'elemento. Questo segnale arriva attraverso il programma all'ingresso di trigger "RESET", i trigger vengono reimpostati su zero e gli starter sulle uscite sono disabilitati. Elementi E con un ingresso inverso tra timer e uscite KM3 e KM4 scollegare queste uscite e, di conseguenza, scollegare gli avviatori responsabili dello shunt delle resistenze nel circuito del rotore quando il motore è spento.

Per impostare un ingresso o un'uscita inversa, è necessario spostare il mouse sul blocco funzionale, selezionare l'ingresso o l'uscita desiderati, premere il tasto destro del mouse e selezionare "Inverti". Allo stesso modo, qualsiasi input o output inverso può essere convertito in normale.
elementi E I numeri 5 e 10 non consentono l'accensione simultanea degli avviatori responsabili della guida del motore Su e Giù (protezione da corto circuito nei contatti di potenza degli avviatori durante l'accensione). Sebbene in questo schema con un interruttore a leva, questo non è possibile.Ma poiché i contatti di blocco di questo tipo erano presenti nel circuito relè originale, si è deciso di tenerli nel programma per il PLC.
Infine, resta da garantire l'arresto istantaneo del motore elettrico quando si apre uno dei contatti all'ingresso. La presenza di trigger nel circuito non ha permesso di farlo inizialmente. Affinché il circuito funzionasse correttamente in qualsiasi emergenza (attivazione di contatti di sicurezza, contatti degli interruttori di scatto, contatto del relè di tensione o pulsante "Arresto generale"), è stato aggiunto un circuito due catene di elementi NON e OR (4 e 7).
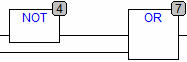
L'elemento NOT precede l'unità logica in ingresso allo zero logico in uscita e viceversa - lo zero in ingresso nell'unità in uscita. Puoi spiegare come funzionano le catene di NOT e OR nel programma? Scrivi nei commenti
Emulazione del programma CFC in CoDeSys
Dopo aver creato il programma, puoi registrarlo CoDeSys in modalità emulazione. Per fare ciò, selezionare "Modalità emulazione" nella scheda "Online", fare clic sul pulsante "Connetti", quindi impostare l'unità logica su tutti gli ingressi - "TRUE", scrivi questi valori nel programma facendo clic su"Ctrl" + F7 e clicca F5 per iniziare.
Modalità di emulazione inCoDeSys:

Simulazione della commutazione dell'ingresso ("TRUE"E"FALSE") è possibile osservare la modifica dei circuiti in blu (percorso del segnale) e la modifica dello stato delle uscite. Dopo ogni modifica dello stato dell'ingresso, non dimenticare di scrivere questi valori nel programma premendo"Ctrl" + F7. Per disabilitare la modalità di emulazione, fai clic su "Stop", quindi su "Disconnetti" nella scheda "Online" e deseleziona la "Modalità di emulazione".
conclusione
Ancora una volta, desidero notare che questo progetto era esclusivamente correlato a obiettivi educativi e non è stato ancora testato su un controller programmabile reale. Se hai qualche domanda e una delle precedenti non è chiara, chiedi nei commenti, proverò a rispondere. Ed è anche molto importante per me ottenere una risposta alla domanda: dovrei continuare a scrivere articoli su questo argomento? In generale, sono pronto ad ascoltare eventuali commenti e suggerimenti costruttivi.
Vedi anche su electro-it.tomathouse.com
: